This project is a fully functional PID-controlled balancing platform designed to demonstrate real-world automatic control using a closed-loop feedback system.
The platform remains stabilized around the horizontal position (0°) by dynamically adjusting the thrust of two brushless propellers placed at the ends of the beam. The control algorithm runs on an ESP32 microcontroller, using feedback from an MPU6050 inertial measurement unit (IMU) to continuously correct the tilt angle.
This system provides a clear and visual demonstration of PID control in a real physical system, making it ideal for learning and experimentation in control engineering, robotics, and mechatronics.
What This Project Demonstrates
This platform allows you to explore and study:
• Closed-loop control systems• PID controller tuning and stability• Inertial sensor feedback (IMU)• Real-time embedded control using ESP32• Brushless motor control through ESCs• Dynamic stabilization of mechanical systems
It provides a hands-on demonstration of automatic control concepts often taught in university courses.
Ideal For
This project is particularly suitable for:
• engineering students• robotics and mechatronics enthusiasts• control systems laboratories• STEM educational demonstrations• university projects and experiments• makers interested in embedded control systems
It is an excellent platform for learning, experimentation, and modification.
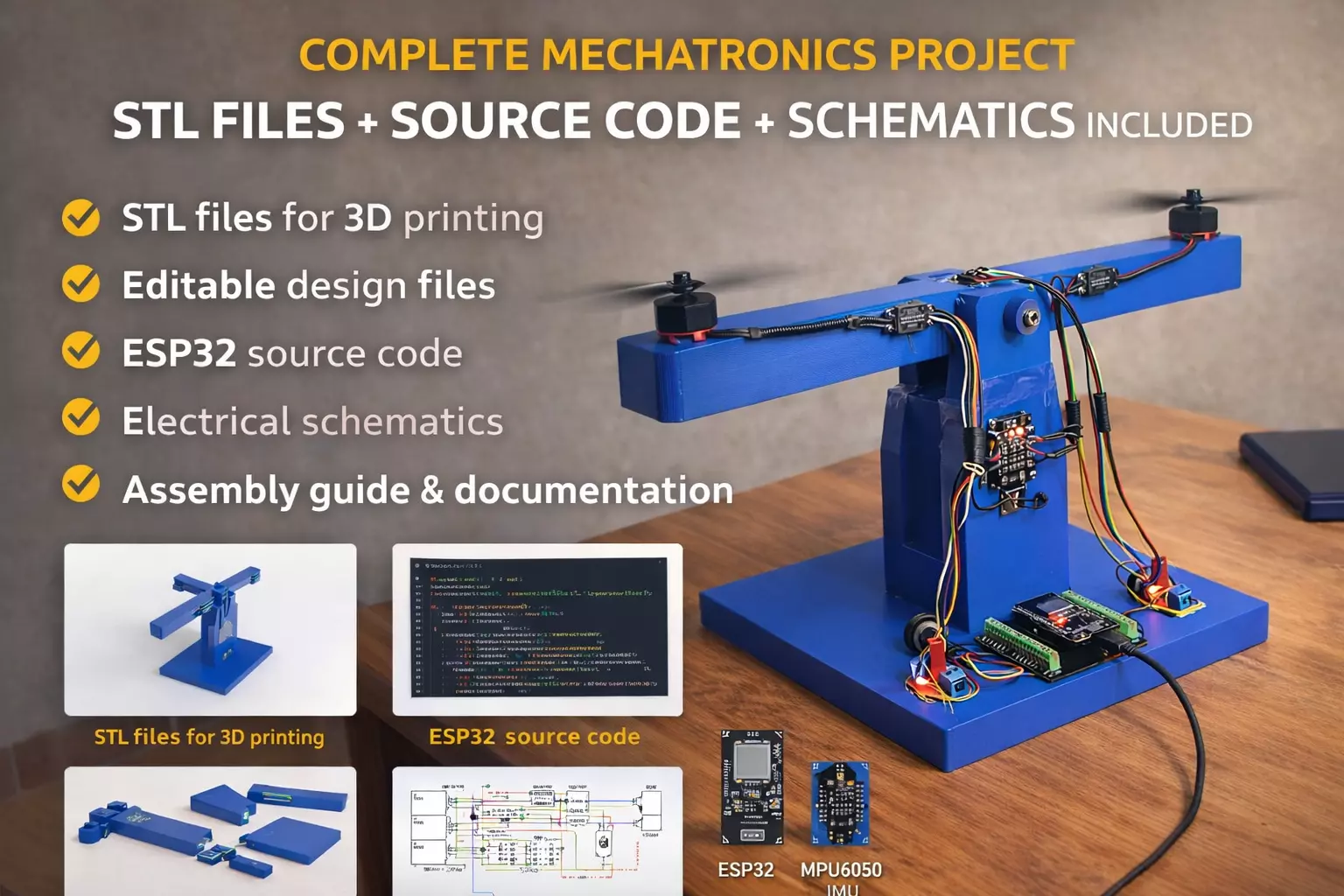
What’s Included in the Package
This package provides everything needed to reproduce and study the system.
Included files:
• STL files ready for 3D printing• Original editable design file for modification and customization• Complete ESP32 source code implementing the PID controller• Electrical schematics of the system• Detailed assembly explanation• Documentation describing the working principle of the system
All files are provided inside a compressed archive for easy download.
Main Components Used
The system is based on commonly available components:
• ESP32 microcontroller – executes the PID control algorithm• MPU6050 IMU sensor – measures platform tilt using accelerometer and gyroscope• 2 brushless motors – generate the thrust required for stabilization• 2 ESC controllers – drive the motors using PWM signals from the ESP32• Potentiometer – allows manual adjustment of the reference angle• 3D printed structural components
3D Printed Parts
The mechanical structure consists of the following printed elements:
• Base structure housing the electronics• Central shaft and support structure• Moving platform supporting motors and sensor
The design is optimized for easy printing and assembly.
How the System Works
The MPU6050 IMU sensor measures the tilt angle of the platform in real time.
The ESP32 microcontroller reads this data through the I²C interface.
A PID control algorithm calculates the correction required to maintain the platform horizontal.
The ESP32 sends PWM signals to the ESC controllers.
The brushless motors adjust their thrust dynamically to stabilize the system.
This continuous feedback loop keeps the system balanced.
Applications
This project can be used for:
• demonstrating PID control principles• studying automatic control systems• learning embedded control programming• robotics and mechatronics experimentation• educational demonstrations of dynamic stabilization
It is particularly useful for visualizing how control theory behaves in real physical systems.
Important Notes
The complete working source code is included and can be modified freely.
The design files allow you to adapt dimensions, modify the structure, or expand the system with additional sensors or features.
This project is intended as an open experimental platform that can be extended and customized according to your needs.
Final Thoughts
This platform provides a practical and engaging way to explore control engineering concepts through a real, working mechanical system.
Unlike purely theoretical simulations, this demonstrator allows you to observe how PID control behaves in real-world conditions, including inertia, disturbances, and actuator dynamics.
It is an excellent tool for learning, experimentation, and advanced engineering projects.