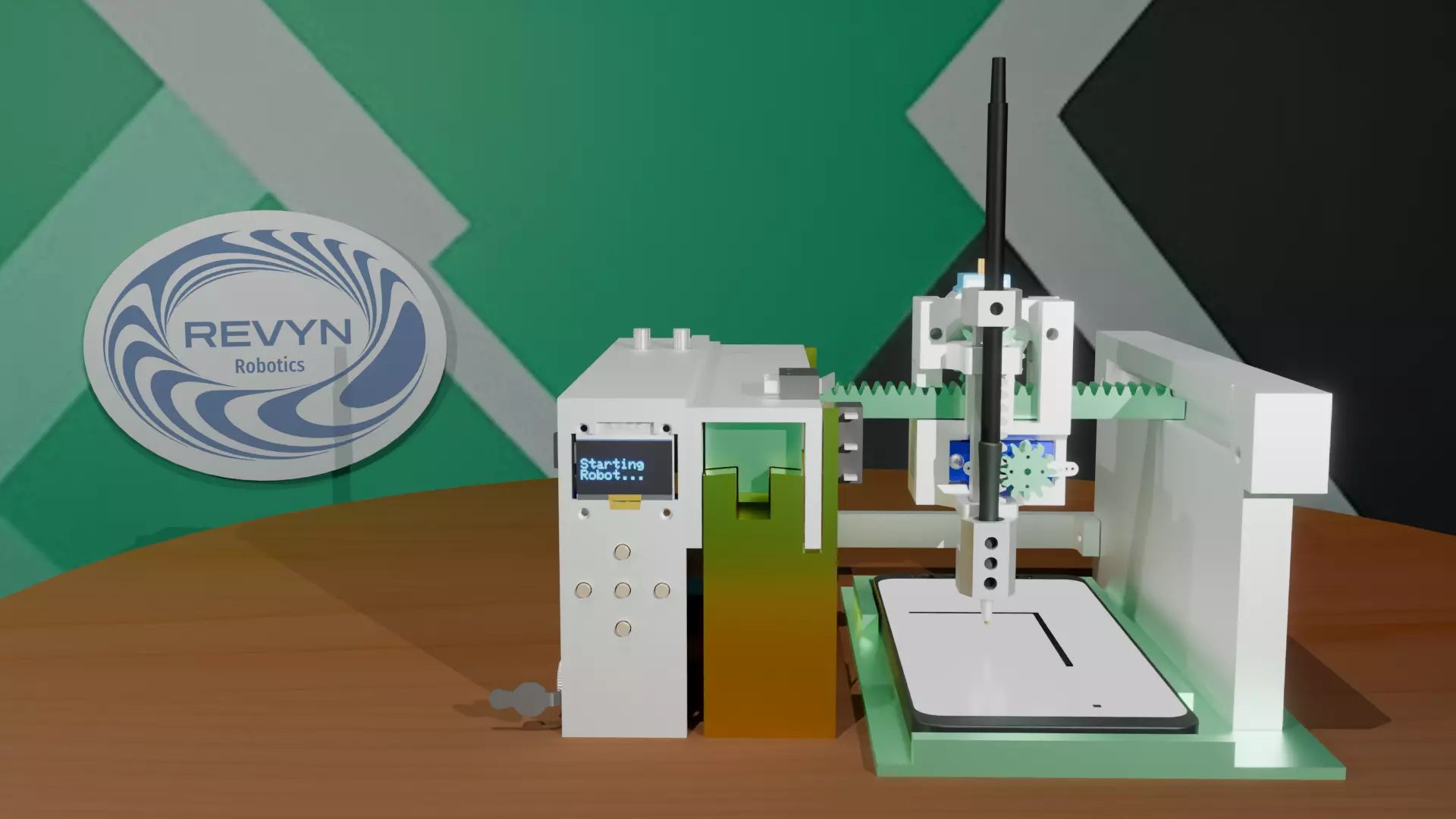
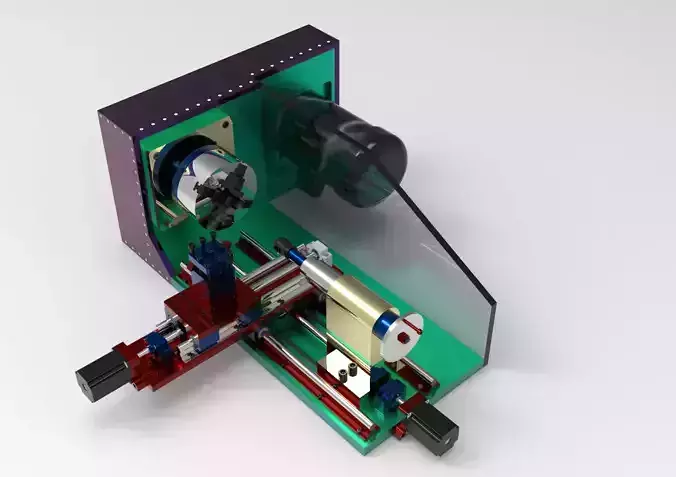
Fully parametric 3D model set for a compact 3-axis Cartesian robot designed for small-scale CNC, plotting, and light automation tasks. The design uses rack and pinion drives on all three axes for precise, repeatable linear motion without belts.
Key features:
Printable on a standard 200×200 mm (8×8") build plate (e.g., Ender 3).
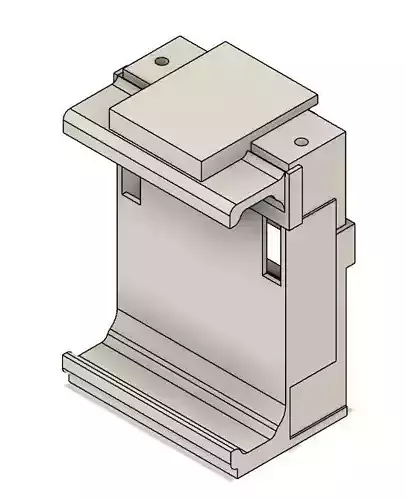
Interchangeable end-effector mount for pens, X-Acto knives, and other small tools.
Designed for 28BYJ-48 stepper motors (2048 steps/rev) with ULN2003 driver boards.
Travel range: ~5x8x1" (127×203×25 mm).
Sturdy frame design with vibration-resistant fasteners.
All rack and pinion parts generated in Fusion 360 using FM Gears add-on.
This model is ideal for hobbyists, educators, and makers looking to build a low-cost desktop automation platform for drawing, engraving, or light CNC operations. All parts are modeled with printability and assembly in mind.
Formats included: STL, STEP, F3D (Fusion 360), plus assembly diagrams.
See more at https://brevinbanks.github.io/Robot3AxisMachine