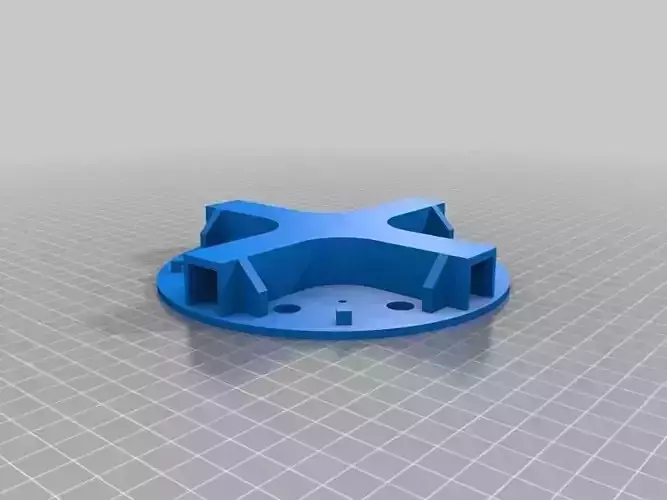
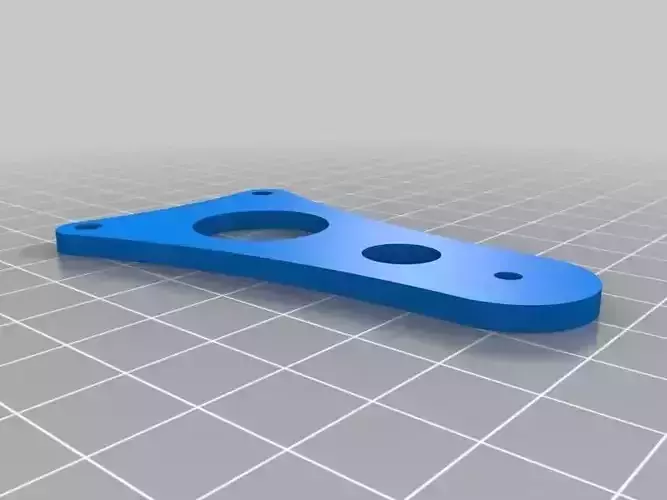
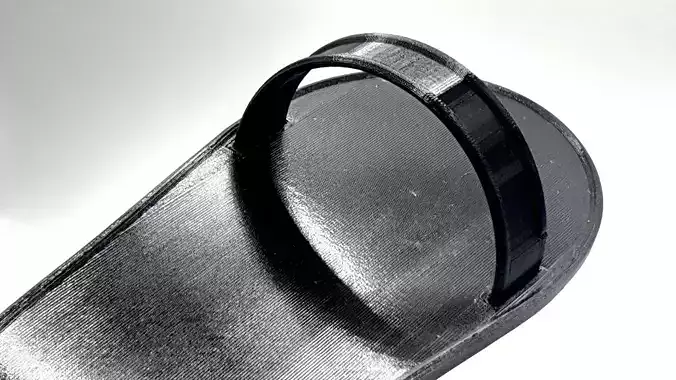
Slinky has been conceived as an individual in a swarm of robots dedicated to exploring rough terrain (like the Lunar surface).The four legs of the Slinky-bot robot have independent movements. They are connected to the body by means of four continuous rotation drives with a feedback of the position. This configuration is very versatile and allows, at least, implement five different locomotion modes: ‘slinky, ‘rolling’, ‘caterpillar’, ‘quadruped’ and ‘whegs’. The two firsts modes have been selected as principal means of locomotion: ‘slinky’ and ‘rolling’. The rest of the modes can be used punctually to overcome obstacles for a better adaptation. These modes base the movement in carrying out back flips or cartwheels. While the robot surface in relation to its mass, is wide, the pressure against the ground is low, which guarantees movement on any kind of surface; even though is sand or dust, avoiding in this way the wheels to be buried. - A complete description of the project can be found here: http://wp.me/p22sj0-b2- Video_Prototype Test: http://youtu.be/x9KxcwdDV3k