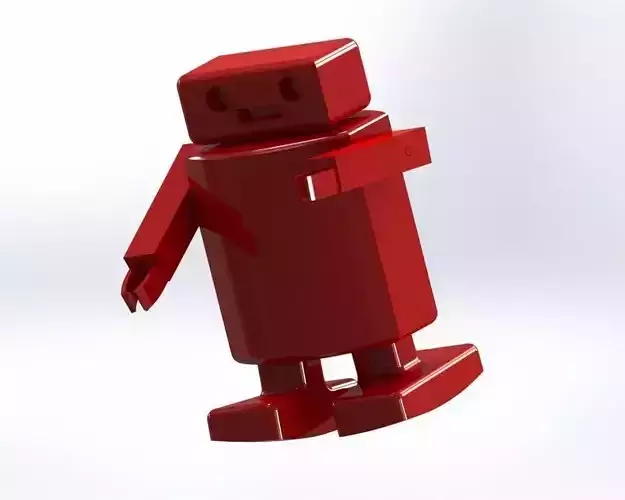
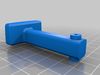
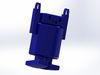
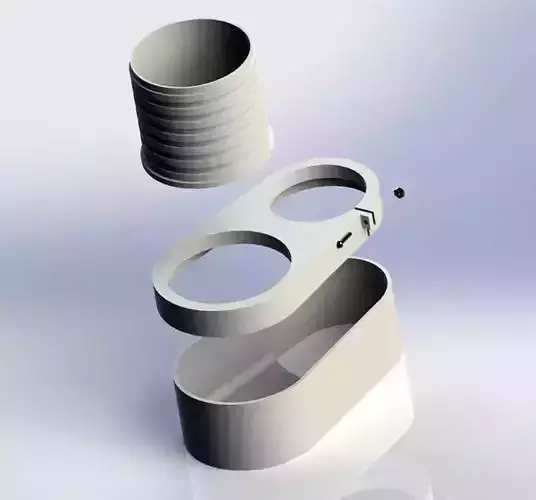
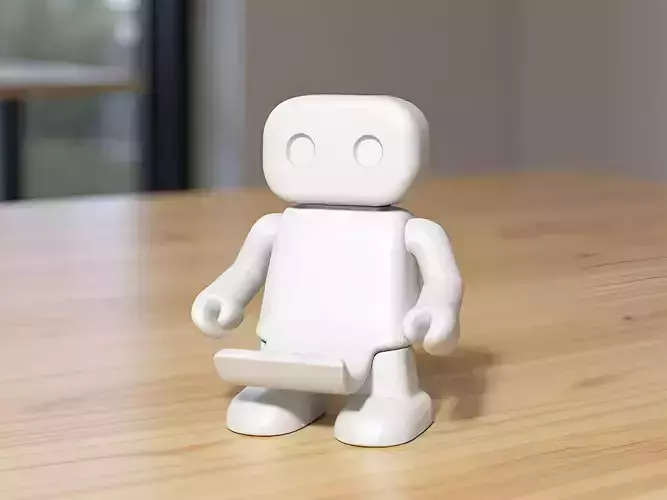
Walkabot is a gravity powered ramp walking robot. Place him on a shallow ramp, tilt him to one side, let go and he will walk down the slope. The robot makes a "walka-walka" sound as he walks. See the video of him walking here: http://youtu.be/vgM6PPkw6cQUse a piece of straightened 1.75mm filament as the axle or print out the axle if your printer can handle the small diameter. Assemble the robot by positioning the legs inside the body and pushing the axle through the body and legs as shown in the assembly diagram. The legs should swing freely inside the body. Attach the arms to the outside of the body on the axle. The arms can be moved up and down to adjust the balance slightly. Walkabot was created with Solidworks and is also based on the plans by Roberto Lou Ma that can be found here: http://blog.dugnorth.com/2011/02/download-plans-for-ramp-walking-wooden.html