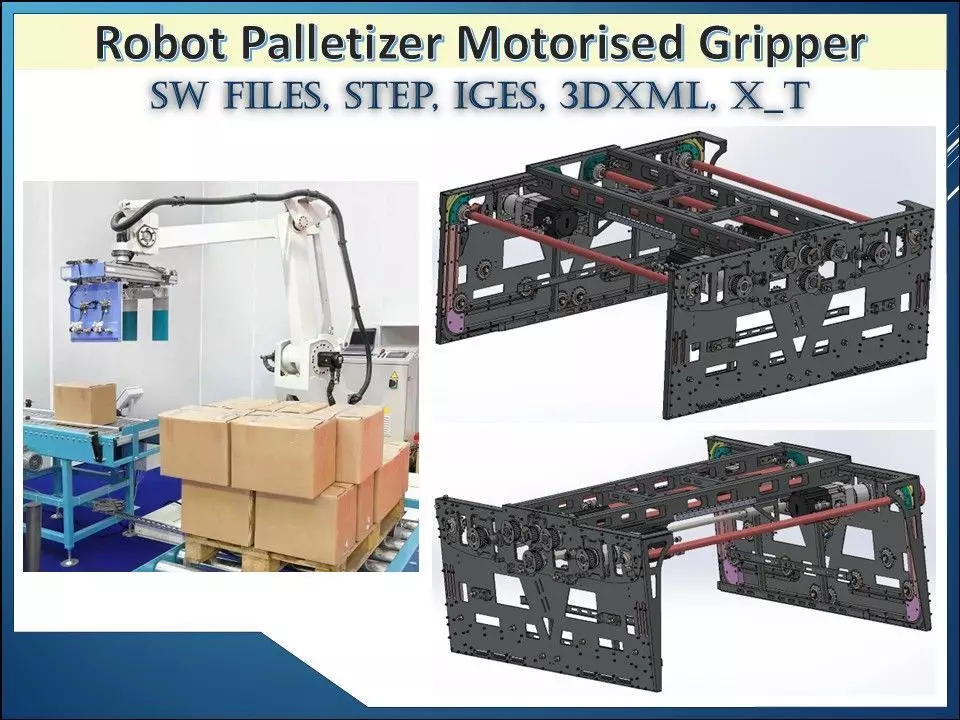
High-precision robot palletizer motorised gripper (EOAT) 3D CAD model designed for automated stacking, palletizing, and material handling applications. The motorised clamper claw gripper ensures strong, controlled gripping with high repeatability, making it ideal for high-speed robotic palletizing systems.Key Features• Motorised EOAT gripper for robot palletizers• Clamper / claw-type gripping mechanism for secure handling• Electric drive for precise force and position control• Suitable for cartons, boxes, trays, and packaged goods• High repeatability for continuous palletizing operations• Robust industrial design for long-duty cycles• Detailed 3D CAD model for robot cell design and simulationOperational Advantages• Consistent gripping force without pneumatic dependency• Faster response and accurate positioning• Reduced maintenance compared to air-driven grippers• Easy integration with industrial robots and palletizersTypical Applications• Robotic palletizing and depalletizing• End-of-line packaging automation• Warehouse and logistics handling• Food, beverage, FMCG, and industrial goods stacking• Robot EOAT design and validationThis CAD model is ideal for robotics engineers, system integrators, and automation OEMs looking to design or integrate a reliable motorised gripper for palletizing applications.